RT-Affordance: A New Approach by Google DeepMind to Robust Robot Manipulation with Versatile Policy Representations
Robotics research has advanced rapidly, leading to the development of models capable of performing increasingly complex manipulation tasks. One key challenge, however, is how to design representations that help robots generalize effectively across diverse tasks and environments. In this blog, we explore RT-Affordance, an innovative hierarchical policy approach that leverages intermediate representations called affordances to improve robot manipulation. Unlike previous approaches that rely on language or goal images, RT-Affordance provides a lightweight, expressive, and versatile solution for complex manipulation tasks.
What are Affordances?
Affordances in the context of robotics are representations that specify how a robot can interact with an object or environment. For example, affordances may describe the optimal position and orientation for a robot’s gripper to pick up a dustpan. Affordances capture spatial and contextual information that is crucial for effective manipulation while remaining simple enough for efficient learning.
RT-Affordance Explained

RT-Affordance builds upon the concept of affordances by conditioning its robot policies on visual and language-based affordance cues. It uses a hierarchical structure where the model first predicts an affordance plan based on the input task (such as a language description) and then conditions the policy on this affordance plan to execute the desired manipulation. This allows robots to receive precise guidance for each key stage of a task.
Unlike existing methods that use goal images or trajectory sketches, which can be cumbersome and over-specified, RT-Affordance provides just the right level of abstraction. This makes it easier for human users to specify tasks, facilitates better generalization across novel scenarios, and enhances the robustness of the robot’s performance.
Key Features of RT-Affordance
- Expressive Yet Lightweight Abstractions: Affordances serve as a compact yet informative way to specify key poses and orientations during a manipulation task. These visual cues reduce ambiguity and simplify learning compared to goal images or other complex spatial representations.
- Hierarchical Learning Model: RT-Affordance employs a two-stage learning model. First, it generates an affordance plan for a given task, which is then used to guide the robot’s actions. This hierarchical setup ensures that both planning and execution are optimized for task performance.
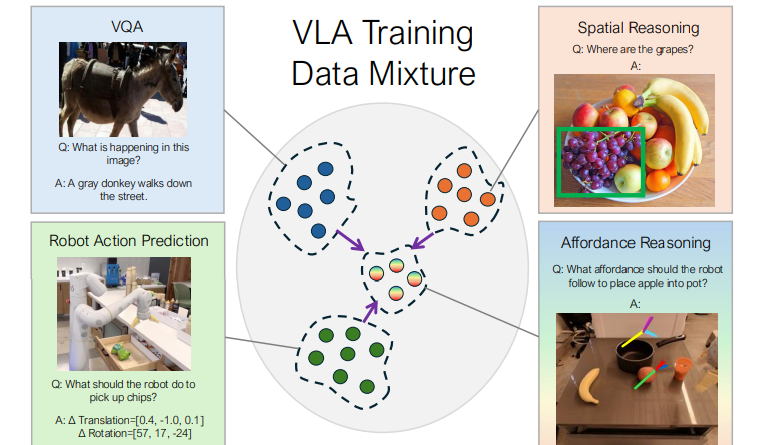
- Integration of Heterogeneous Data Sources: The model is trained using a diverse set of data, including robot trajectories, large-scale web datasets, and in-domain affordance images. This integration of multiple data sources helps the model generalize effectively across new environments and tasks.
- Cost-Effective Data Collection: To enhance scalability, RT-Affordance also uses cheap-to-collect in-domain images that are manually annotated with affordance labels. This approach bypasses the need for expensive robot demonstrations, significantly reducing the cost of data collection.
Experimental Results
RT-Affordance was tested on a diverse set of tasks, including object grasping and articulated manipulations. Here are some of the key findings:
1. Success Rate Improvement: The RT-Affordance model achieved an average success rate of 69%, a significant improvement over traditional language-conditioned policies, which achieved only 15% success. When using oracle-provided affordances, the success rate increased to 76%.

2. Efficiency in Learning Novel Tasks: RT-Affordance demonstrated that it could learn novel tasks without relying on additional costly robot demonstrations. By incorporating web data and affordance images, it achieved robust performance in both seen and unseen environments.

3. Generalization to Out-of-Distribution (OOD) Scenarios: One of the key strengths of RT-Affordance is its ability to generalize well to new environments. Experiments showed a 10% reduction in performance when applied to OOD settings, demonstrating the model’s robustness compared to other approaches that failed drastically under similar conditions.

Practical Applications
- Household Robotics: In domestic environments, robots need to interact with a wide variety of objects. RT-Affordance enables robots to efficiently pick up and place items, like kettles, pots, or boxes, even when these objects are novel or placed in unfamiliar positions.
- Warehouse Automation: In warehouses, robots often need to handle different types of packages with precise positioning. Affordance-based policies provide the exact spatial context required for safe and accurate manipulation, improving reliability in high-stakes environments.
- Healthcare and Assisted Living: In healthcare settings, robots may need to assist with various daily tasks, from picking up small items to adjusting equipment. RT-Affordance’s adaptability allows it to perform these tasks with minimal pre-training.
Comparison to Previous Methods
RT-Affordance stands out from previous approaches in several ways:
- Language Conditioning vs. Affordances: Language-based policies often lack the spatial specificity needed for fine-grained manipulation. RT-Affordance bridges this gap by providing precise cues about object orientation and positioning.
- Goal Images and Trajectory Sketches: While goal images offer detailed context, they can be over-specified and hard to generalize. Affordances are simpler and easier to work with, making them ideal for specifying critical points without unnecessary details.
Conclusion
RT-Affordance is a significant advancement in the field of robotic manipulation. By utilizing affordances as intermediate representations, it achieves an optimal balance between expressivity and simplicity, making it easier for robots to learn and generalize complex tasks. The use of heterogeneous data sources and cost-effective learning techniques further adds to its scalability, paving the way for broader applications in various industries.
With RT-Affordance, the promise of robots that can adapt to diverse real-world environments is closer than ever. It is an exciting time for robotics, as we continue to bridge the gap between research and practical deployment.
Got an incredible AI tool or app? Let’s make it shine! Contact us now to get featured and reach a wider audience.
Explore 3600+ latest AI tools at AI Toolhouse 🚀. Don’t forget to follow us on LinkedIn. Do join our active AI community on Discord.
Read our other blogs on AI Tools 😁
If you like our work, you will love our Newsletter 📰