TRANSIC: Bridging Simulation and Reality for Advanced Robotic Policies
Sim-to-real transfer is a crucial challenge in the field of robotics, where policies learned in simulation need to be effectively transferred and deployed in the real world. Researchers at Stanford University have proposed TRANSIC, a human-in-the-loop method that addresses the sim-to-real transfer problem for contact-rich manipulation tasks. This innovative approach leverages the power of human feedback and intervention to improve the success rate of policy transfer, surpassing existing methods in performance and scalability.
The Sim-to-Real Transfer Challenge
Learning in simulation and applying the learned policies to real-world scenarios can enable generalist robots capable of solving complex manipulation tasks. However, there are significant gaps between simulation and reality that need to be overcome for successful policy transfer. These gaps include system identification, domain randomization, real-world adaptation, and simulator augmentation. Closing these gaps is essential for robust sim-to-real transfer and ensuring the policies learned in simulation generalize well to real-world environments.
Human-in-the-Loop Robot Learning
Human-in-the-loop robot learning is a framework that incorporates human knowledge and feedback into the learning process of autonomous systems. This approach leverages the expertise and intuition of humans to improve the performance of robotic systems in sequential decision-making tasks. By integrating human feedback, interventions, and corrections, robots can learn more effectively and adapt to real-world scenarios.
Introducing TRANSIC
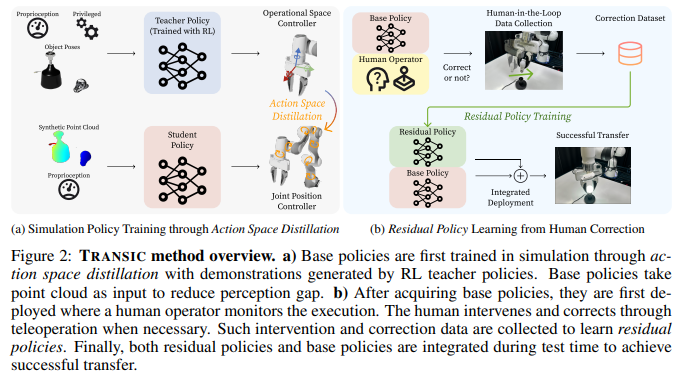
TRANSIC, proposed by Stanford researchers, is a data-driven method that enables successful sim-to-real transfer of policies using a human-in-the-loop framework. It allows humans to enhance simulation policies through intervention and online correction, addressing the unmodeled sim-to-real gaps. By learning residual policies from human corrections and integrating them with simulation policies, TRANSIC achieves successful sim-to-real transfer in contact-rich manipulation tasks.
TRANSIC stands out for its ability to scale with human effort, making it a promising solution for real-world robotics applications. The method leverages the collaboration between humans and robots, harnessing both the power of simulations and the intuition of humans to bridge the gap between simulation and reality.
How TRANSIC Works
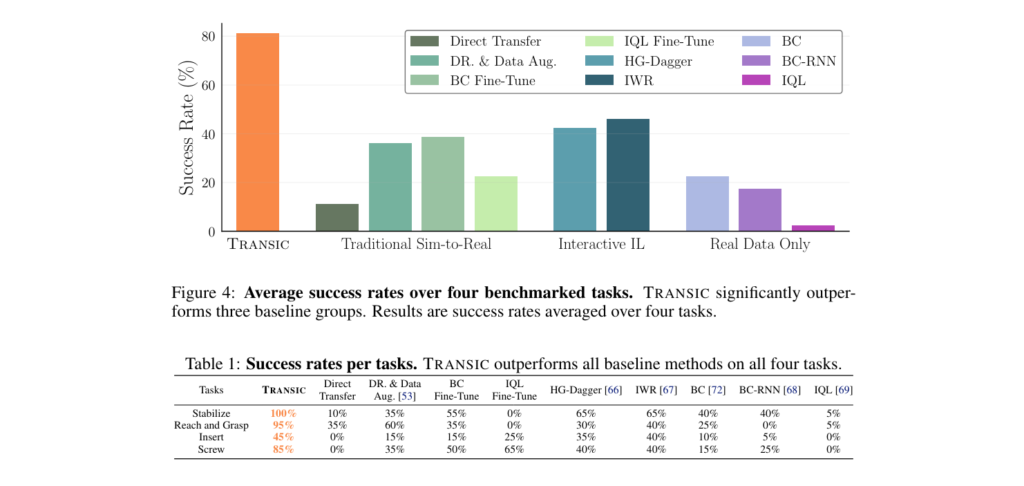
To address the sim-to-real transfer challenge, TRANSIC creates five different simulation-reality pairs, intentionally introducing large gaps between the simulation and the real world. By gradually closing these gaps using the intervention and correction data provided by humans, TRANSIC achieves a remarkable average success rate of 77% across all five pairs. This outperforms existing baseline methods, such as IWR, which only achieves an average success rate of 18%.
One of the key advantages of TRANSIC is its ability to learn reusable skills for category-level object generalization. This means that once the gating mechanism is learned, the robot can operate autonomously in a wide range of scenarios without requiring extensive retraining. TRANSIC also addresses the challenge of dealing with partial point cloud observations and correction data, making it suitable for real-world manipulation tasks where sensor data can be noisy or incomplete.
Human Data Scalability
TRANSIC demonstrates superior scalability with human correction data compared to existing methods. When the size of the correction data increases from 25% to 75%, TRANSIC achieves a relative improvement of 42% in the average success rate, surpassing the performance of IWR, which only achieves a 23% relative improvement. This highlights the effectiveness of TRANSIC in utilizing human feedback to improve policy transfer.
Limitations and Future Directions
While this method presents a significant advancement in sim-to-real policy transfer, it has some limitations that need to be addressed. Currently, the method is primarily focused on tabletop scenarios with a soft parallel-jaw gripper. Expanding its applicability to a broader range of manipulation tasks and gripper types would enhance its practicality.
Another limitation is the requirement for a human operator during the correction data collection phase. This dependency on human intervention may limit the scalability of the method in certain scenarios. Future research could explore ways to reduce human involvement while maintaining or improving the performance of TRANSIC.
Additionally, TRANSIC relies on simulation policies with reasonable performance to achieve successful transfer. Enhancing the self-learning capabilities of TRANSIC, allowing it to start from sub-optimal simulation policies, would increase its versatility and applicability to a wider range of scenarios.
Conclusion
This method proposed by Stanford University researchers presents a groundbreaking solution to the sim-to-real transfer problem in contact-rich manipulation tasks. By leveraging the power of human feedback and intervention, TRANSIC achieves superior performance in policy transfer compared to existing methods. With its ability to bridge the gap between simulation and reality, TRANSIC paves the way for the development of more capable and adaptable robotic systems.
As robotics continues to advance, sim-to-real transfer methods like TRANSIC hold great promise in enabling robots to perform complex manipulation tasks in real-world environments. The collaboration between humans and robots, combined with data-driven approaches, opens up new possibilities for the future of robotics.
Check out the Paper. All credit for this research goes to the researchers of this project. Also, don’t forget to follow us on LinkedIn. Do join our active AI community on Discord.
Explore 3600+ latest AI tools at AI Toolhouse 🚀.
If you like our work, you will love our Newsletter 📰