OpenRAVE: The Ultimate Planning Architecture for Autonomous Robotics
Autonomous robotics has witnessed significant progress in recent years, with robots being able to perform complex tasks in dynamic environments. The key to enabling these advancements lies in the development of robust planning architectures that empower robots to plan, perceive, and execute tasks autonomously. In this article, we will explore various planning architectures for autonomous robotics, with a special focus on OpenRAVE, a versatile open-source software architecture designed to address the complexities of robotic planning and control.
What is OpenRAVE?
It is an open-source cross-platform software architecture known as Open Robotics and Animation Virtual Environment. It provides a comprehensive framework for developing and testing planning algorithms in autonomous robotics. OpenRAVE is designed to be modular and scalable, with clear separation of functionalities through its layered architecture.
Core Components:
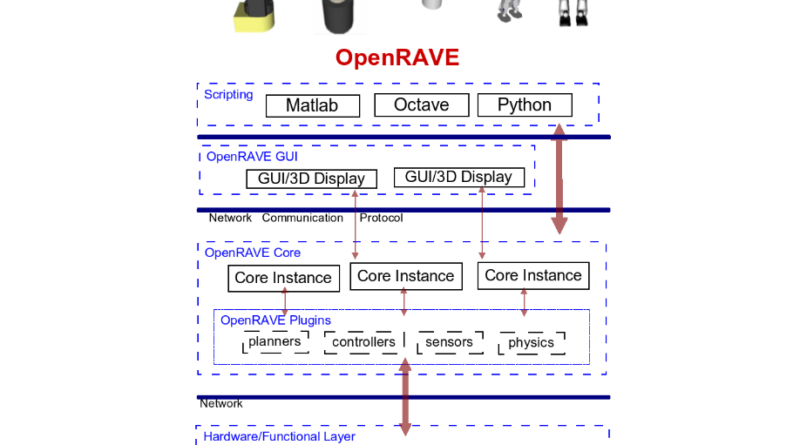
The OpenRAVE architecture consists of several layers:
- Core Layer: The core layer of OpenRAVE forms the foundation of the architecture. It includes essential functionalities such as data structures, algorithms, and the underlying physics simulation engine. This layer enables the planning and control of robots in a virtual environment.
- GUI Layer: The GUI layer provides a graphical user interface to interact with the virtual environment. It allows users to visualize and manipulate objects, robots, and their trajectories. The GUI layer enhances the user experience and facilitates the development and debugging of algorithms.
- Scripting Layer: The scripting layer allows users to write scripts and programs to control the behavior of robots within the virtual environment. It provides a high-level interface for users to define complex tasks and execute them using planning algorithms.
- Plugin Layer: The plugin layer enables the integration of external libraries, algorithms, and sensors into the OpenRAVE architecture. This layer enhances the functionality of OpenRAVE by allowing users to leverage existing tools and algorithms.
Plugins and Interfaces:
It supports a wide range of plugins and interfaces that extend its capabilities. These plugins and interfaces enable the integration of various functionalities, such as perception, planning, and control, into the architecture. Some commonly used plugins and interfaces in OpenRAVE include:
- Perception Plugins: Perception plugins enable the processing of sensor data to extract relevant information about the environment. These plugins provide inputs to the planning algorithms, allowing them to make informed decisions.
- Planning Plugins: Planning plugins implement algorithms that generate motion plans for robots based on their current state and the desired goal. These plugins take into account the constraints and dynamics of the robot and the environment.
- Control Plugins: Control plugins interface with the hardware of the robot to execute the generated motion plans. They translate the planned trajectories into commands that can be executed by the robot’s actuators.
By providing a modular plugin system, OpenRAVE allows users to customize and extend the functionality of the architecture to suit their specific needs. This flexibility makes OpenRAVE a powerful tool for developing and testing planning algorithms in autonomous robotics.
Manipulation and Grasping:
OpenRAVE has been widely used for developing and testing manipulation and grasping algorithms. These algorithms enable robots to interact with objects in their environment and perform tasks such as picking, placing, and manipulating objects. OpenRAVE’s modular architecture allows for easy integration of manipulation and grasping algorithms, making it a popular choice among researchers and developers.
For example, the Barrett WAM arm has been used in various experiments to demonstrate autonomous grasping and manipulation in cluttered environments. The flexibility of OpenRAVE’s architecture allows it to be easily adapted to different robotic platforms and sensors, making it a versatile tool for manipulation and grasping tasks.
Case Study: The HRP2 humanoid robot utilizes OpenRAVE for planning autonomous grasping and manipulation tasks. The architecture’s flexibility allows for easy adaptation to different robotic platforms and sensors, making it an ideal choice for humanoid robots.
Real-time Execution and Monitoring:
One of the significant strengths of OpenRAVE is its capability to support real-time execution and monitoring. The architecture’s design facilitates the seamless transition from simulation to real-world applications. This feature is particularly important in autonomous robotics, where robots need to dynamically adapt their plans based on sensory feedback.
For example, the “robotic busboy” experiment demonstrates how OpenRAVE can be used to plan and execute tasks such as picking up objects from a tray and placing them in a designated location, adjusting plans in real-time based on sensory feedback.
Planning architectures like OpenRAVE play a crucial role in advancing the capabilities of autonomous robotics. By providing a flexible, open-source framework for integrating planning algorithms with real-time control systems, OpenRAVE enables researchers and developers to tackle complex robotic tasks efficiently. Its modular design and robust interface make it a valuable tool for robotics.
In conclusion, planning architectures are vital for enabling autonomous robotics to perform complex tasks in dynamic environments. OpenRAVE, with its versatile open-source software architecture, provides a comprehensive framework for developing and testing planning algorithms. By supporting modularity, scalability, and real-time execution, OpenRAVE empowers researchers and developers to push the boundaries of autonomous robotics.
Explore 3600+ latest AI tools at AI Toolhouse 🚀. Don’t forget to follow us on LinkedIn. Do join our active AI community on Discord.
Read our other blogs on AI Tools 😁
If you like our work, you will love our Newsletter 📰