Introducing Learnable LCB
The field of artificial intelligence (AI) continues to evolve at a rapid pace, with researchers constantly pushing boundaries and developing new techniques to enhance machine learning models. One such breakthrough comes from the University of California, Berkeley, where researchers have introduced Learnable Latent Codes as Bridges (LCB), a novel AI approach that combines the abstract reasoning capabilities of large language models with low-level action policies.
The Need for Hierarchical Control Architectures
In the field of robotics, there has been a longstanding debate between two primary architectural paradigms: modular hierarchical policies and end-to-end policies. Modular hierarchies rely on rigid layers such as symbolic planning, trajectory generation, and tracking, while end-to-end policies leverage neural networks to directly map sensory input to actions. While both approaches have their merits, hierarchical control architectures have gained renewed interest with the advent of large language models (LLMs).
Leveraging Large Language Models for Reasoning
Large language models, such as ChatGPT, have demonstrated impressive reasoning capabilities and have opened up new possibilities for a wide range of applications. These models excel at high-level reasoning tasks and can understand and generate human-like language. As a result, researchers have begun exploring the integration of LLMs into task planning and reasoning in robotics.
However, integrating LLMs into hierarchical control architectures poses challenges in defining control primitives and establishing interfaces between layers. Coordinating diverse human-like movements that go beyond semantic action verbs is particularly challenging.
Introducing Learnable Latent Codes as Bridges (LCB)
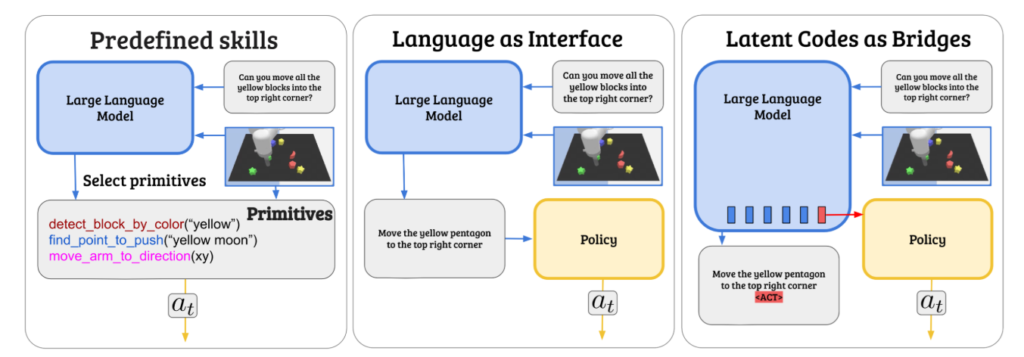
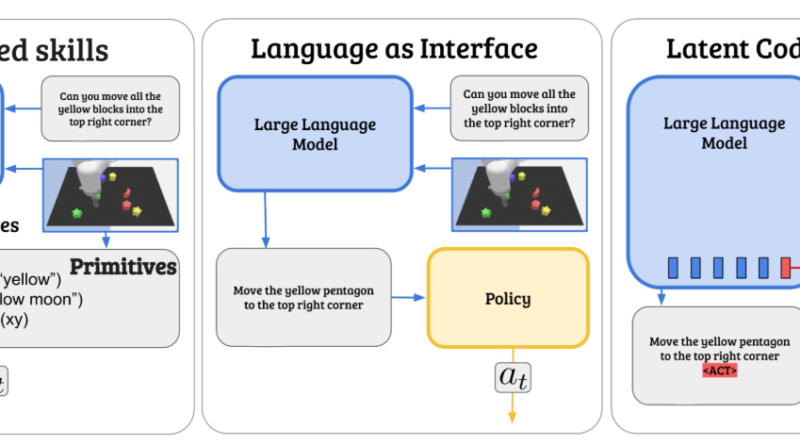
To address these challenges, researchers from UC Berkeley have introduced Learnable Latent Codes as Bridges (LCB), a robust policy architecture for control. LCB combines the strengths of modular hierarchical architectures with end-to-end learning, enabling the direct utilization of LLMs for high-level reasoning alongside pre-trained skills for low-level control.
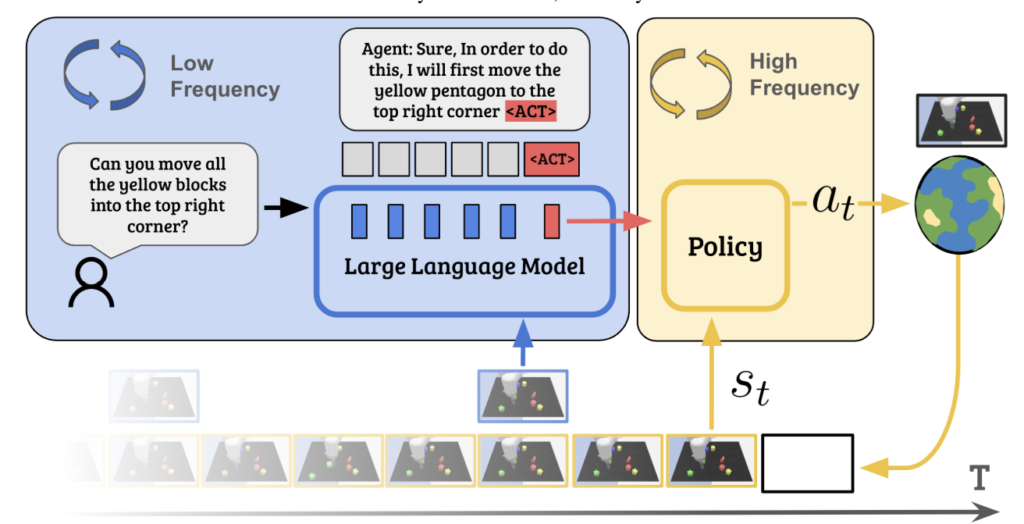
The LCB architecture introduces an additional latent code that serves as a bridge between high-level reasoning and low-level language-conditioned policies. This approach allows LCB to preserve both abstract goals and language embedding space, offering improved flexibility and preservation of language understanding during fine-tuning.
Integrating LCB into Task Planning and Reasoning
The integration of LCB into task planning and reasoning involves generating conversational-style interactions to train the model for language-guided action execution. This approach enables LCB to process multimodal inputs and generate corresponding action outputs based on environment observations and conditioning latent.
Advantages of LCB in Robotics Applications
Experiments conducted on benchmarks such as the Language Table and CALVIN have demonstrated the superiority of LCB over baselines, including models like GPT-4V. LCB outperforms these models in tasks that require reasoning and multi-step behaviors, showcasing its ability to leverage the abstract reasoning capabilities of LLMs while enhancing task performance through the effective extraction of features.
Conclusion
The introduction of Learnable Latent Codes as Bridges (LCB) by UC Berkeley researchers represents a significant advancement in the field of AI and robotics. By combining the abstract reasoning capabilities of large language models with low-level action policies, LCB offers a robust policy architecture for control. This novel approach not only enhances task performance but also addresses the challenges associated with integrating language models into hierarchical control architectures.
LCB’s ability to bridge high-level reasoning with low-level language-conditioned policies opens up possibilities for a wide range of applications in robotics. As the field continues to evolve, LCB and similar approaches hold the promise of unlocking even greater capabilities in AI systems.
Check out the Paper. All credit for this research goes to the researchers of this project. Also, don’t forget to follow us on LinkedIn. Do join our active AI community on Discord.
Explore 3600+ latest AI tools at AI Toolhouse 🚀.
If you like our work, you will love our Newsletter 📰